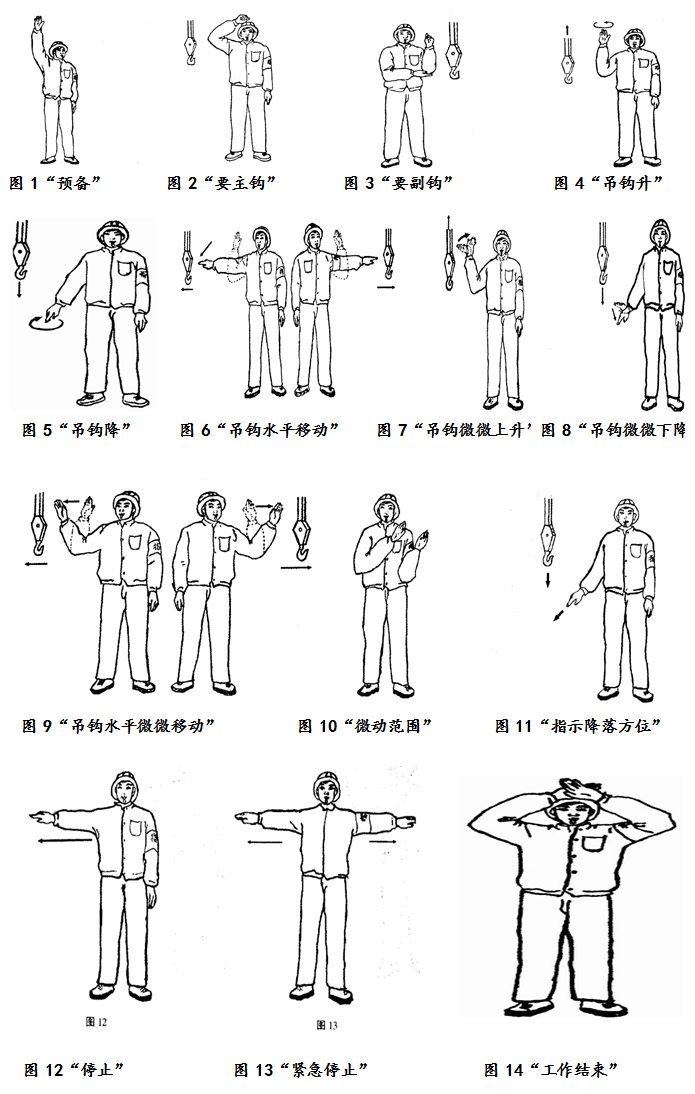
1.“预备”(注意):手臂伸直,置于头上方,五指自然伸开,手心朝前保持不动。(图1)
2.“要主钩”:单手自然握拳,置于头上,轻触头顶(图2)
3.“要副钩”:一只手握拳,小臂向上不动,另一只手伸出,手心轻触前只手的肘关节(图3)。
4.“吊钩上升”:小臂向侧上方伸直,五指自然伸开,高于肩部,以腕部为轴转动(图4)。
5.“吊钩下降”:手臂伸向侧前下方,与身体夹角约为30°,五指自然伸开,以腕部为轴转动(图5)。
6.“吊钩水平移动”:小臂向侧上方伸直,五指并拢手心朝外,朝负载运行的方向,向下挥动到与肩相平的位置(图6)。
7.“吊钩微微上升”:小臂伸向侧前上方,手心朝上高于肩部,以腕部为轴,重复向上摆动手掌(图7)。
8.“吊钩微微下降”:手臂伸向侧前下方,与身体夹角约为30°,手心朝下,以腕部为轴,重复向下摆动手掌(图8)。
9.“吊钩水平微微移动”:小臂向侧上方自然伸出,五指并拢手心朝外,朝负载应运行的方向,重复做缓慢的水平运动(图9)
10.“微动范围”:双小臂曲起,伸向一侧,五指伸直,手心相对,其间距与负载所要移动的距离接近(图10)。
11.“指示降落方位”:五指伸直,指出负载应降落的位置(图11)。
12“停止”:小臂水平置于胸前,五指伸开,手心朝下,水平挥向一侧(图12)。
13.“紧急停止”:两小臂水平置于胸前,五指伸开,手心朝下,同时水平挥向两侧(图13)。
14.“工作结束”:双手五指伸开,在额前交叉(图14)。